初回はロボット農機の開発の現状と2年以内に日本が世界に先駆けてロボットを社会実装するという内容について述べました。日本の農業ロボット技術は世界的に高いのです。世界も注目しています
さて読者の皆さんはたぶんこのロボット農機の価格が気になることと思います。圃場で作業するロボット農機は人工衛星によって高精度な測位を実現するためにリアルタイム・キネマティクス(RTK)という方式を採用しなければなりません。このRTK方式GPS(以下、RTK-GPS)を採用すると測位誤差は2〜3cmで、狭い日本の農地でもロボット農機に正確に作業をさせることができます。
しかし、このRTK-GPSの受信機は高価です。もともと測量用に開発されたものですから高性能なものは150〜200万円します。さらに作業走行中手放し運転できるオートステアリングシステムになるとRTK-GPS、ディスプレイ、コントローラなどすべて含めて250万円程度になります。この価格では北海道のような大規模農業を実践している地域以外は、なかなか高価で導入しずらいと思います。
さらにRTK-GPSは測位精度を高めるための補強信号を必要としますので、その補強信号を生成・放送するGPS基地局を別途設置しなければなりません。GPS基地局は一種インフラですので一般に自治体やJAが設置して地域の農家の方に使ってもらうようにしている場合が多いです。その他、補強信号を携帯端末で受信して高精度測位できる補強信号配信サービスもありますがこちらは有料です。このような話を聞くとGPS基地局のインフラも整備されていないし、オートステアリングシステムですらとても高価で手が出ないと思われることでしょう。実際にいまオートステアリングシステムが普及しているのは北海道ぐらいです。

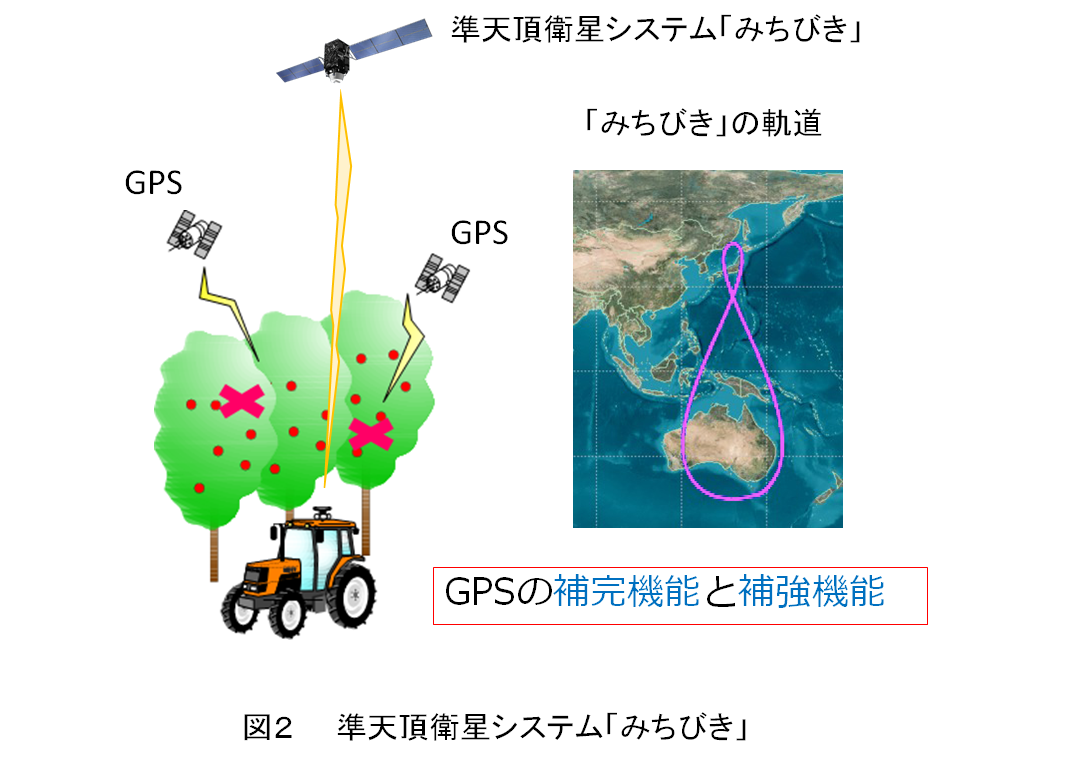
図1からわかるように北海道では急速に普及が進んでいます。そうなると本州の小区画でかつ分散した圃場で営農している農家さんは、このような農作業の自動化技術を導入することは無理ということでしょうか? そんなことはありません。いま日本政府が整備を進めている測位衛星システムに準天頂衛星システム「みちびき」があり、この技術が社会を大きく変えます。「みちびき」は2018年4月にサービスを開始する予定ですが、機能として高仰角から航法信号(軌道情報及び時刻情報)を提供するGPSの「補完機能」とGPSの測位精度を向上させる上で必要な補強信号を送信する「補強機能」を有します(図2)。
前者は山間部やビル陰など十分に可視衛星数が確保できない場所において測位が可能になり、後者はセンチメートル級の測位精度を実現します。そうなると先ほどのGPS基地局は不要になります。日本全国どこでも2, 3cmの誤差でリアルタイムで測位できる社会が実現します。
さらに、いま私がプログラムディレクターを務めている内閣府の戦略的イノベーション創造プログラム(SIP)「次世代農林水産業創造技術」(以下、SIP農業)では準天頂衛星システムを利用した高精度かつ超低コストな受信機を開発中です。このSIP農業以外にも自動車の自動運転を念頭に置いた超低コスト衛星測位システムも開発中で、近いうちに本当に安価で高精度な測位システムが実現します。そのときオートステアリングシステムやロボット農機は日本の隅から隅まで使われるようになります。
いま、我々の研究室ではさらに進んだロボット農機を開発中です。マルチロボットシステムと呼んでいますが、複数台の中型のロボットトラクタが相互に通信しながら協調して安全に農作業するロボットシステムです。3台のロボットトラクタが同じ作業を協調して行えば3倍の作業能率、5台が協調作業すれば5倍の能率になる技術です。図3はロボットトラクタ4台が協調作業していますが、台数に制限はありません。
10台でも100台でも大丈夫です。日本の営農の大規模化は、圃場の数を増やす、そして農地集積と基盤整備により大区画化された圃場を利用することで進むのでしょう。このマルチロボットは両方の規模拡大に対応できるのも特徴です。分散した圃場ごとに1台づつ作業させることもできますし、広い圃場では複数台同時に協調作業させることもできます。圃場の大きさ、作業時間などを考慮して、とても柔軟な作業計画を立てることができるのです。
また良いことに大きいトラクタを無人化するのではありません。日本で一番売れている小型・中型のトラクタをロボット化して、圃場規模の変化にはロボットの台数で調整するのです。そうすれば販売数も増えますのでロボットの価格も安くなります。

他方、このようなロボットによる農業が実現すると農家は何をするんだという質問を耳にします。また、少人数で大面積の農作業ができるようになると農村地帯にますます人がいなくなり、地域崩壊を助長するのではないかとの厳しいコメントももらいます。確かにもともと高齢化など農作業の人手不足から生まれたロボット技術ですから使い方によっては、少ない人数で大面積が管理でき、結果的に地域住民が減ることになることは否めません。
ただ、その考え方は単純すぎます。ロボット農機を導入して規模拡大を図るチャレンジする農家さんであれば、トラクタなど農機に乗らなくなった空いた時間を有効に使って、さらに儲ける事業を考えるでしょう。たとえば、いままで労働力の制限から作ることができなかった高品質な野菜や花き生産を始めることもできるでしょう。またJAの協力を得ながら周辺農家と農産物の加工食品製造を始めるかもしれません。
日本政府の目標は6次化で2020年までに10兆円の市場を形成することです。農にはじまり食そして健康というバリューチェーンができれば、人はあつまります。いずれにしてもロボットを活用することで労働生産性が格段に向上するわけですから、余剰労働力は新産業創生ひいては地域活性化の原動力になります。いまのロボットは単純なことしかできません。複雑なことや創造的なことは今のロボットではとても無理です。上手にロボットを使うと様々な可能性が広がります。
 |
 |
最後に欧米のロボット農機の開発状況を少し説明したいと思います。農業の近代化は「機械の大型化」の歴史でした。1人の農家の食料生産・供給の増大が人を農業以外の産業に従事させることを可能にし、いまの人類の豊かさを生み出しました。この原動力が「機械の大型化」で、これが営農の大規模化を可能にしました。
たとえば、アメリカでは1870年台までは全国民の半数が農業に従事していました。1960年には国民12人に1人、1976年には26人に1人、最近では一人の農家が60人以上の食糧を生産しています。そして家族経営で1200haを耕作しているのです。しかし、「機械の大型化」によるメリットとともに問題も顕在化してきました。
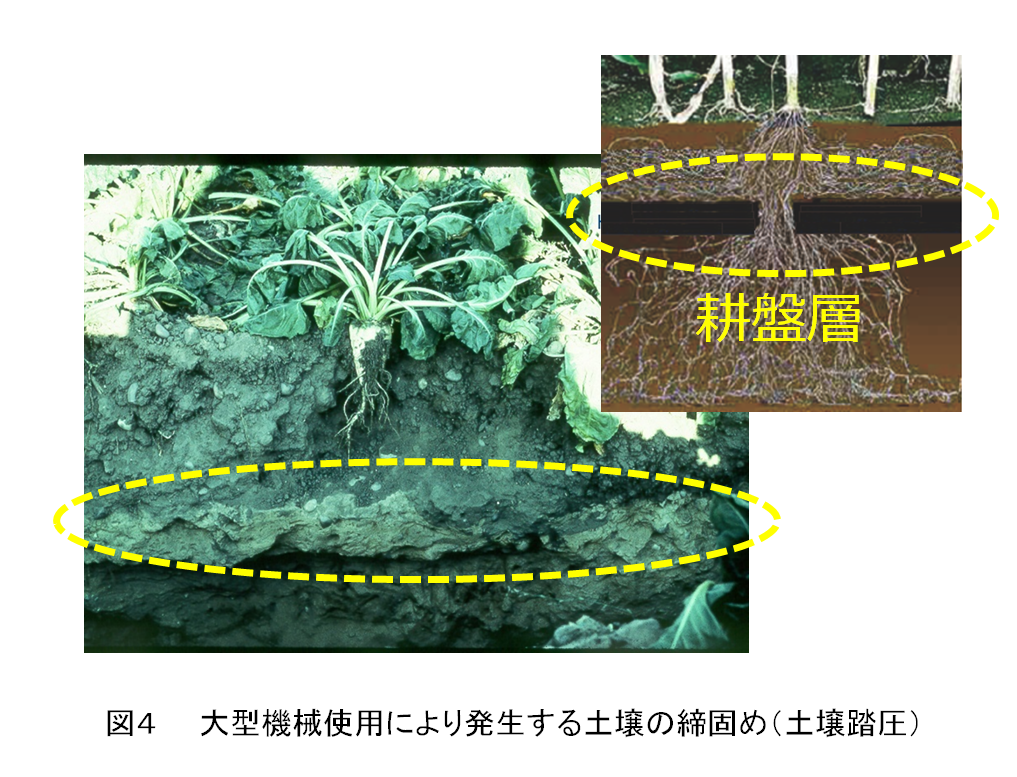
図4のように大型機械使用により作物の根の生育環境や圃場排水性を悪化させ、その対策として行われる心土破砕の消費エネルギが増大しました。EUの調査では農業生産に使用される石油エネルギの90%がこの心土破砕に費やされ、大型機械の使用が石油エネルギ消費の増加を引き起こしています。また、近年の気候変動によって降水量が増加し、大型トラクタや大型コンバインは圃場が湿りすぎて中に入れない日が増え作業に支障がでてきています。
スコットランドでは2012年秋の大雨の影響で大型機械による小麦播種作業やトウモロコシ、馬鈴薯の収穫作業ができず大きな損害を被りました。この問題解決に大型農機から小型ロボットによる精密作業への移行があげられます。作物をグリット状に播種・栽培できれば畝間除草とともに株間除草も極めて容易になり、雑草にピンポイントに除草剤を施用できれば、慣行の99.9%まで除草剤使用量を削減できます。
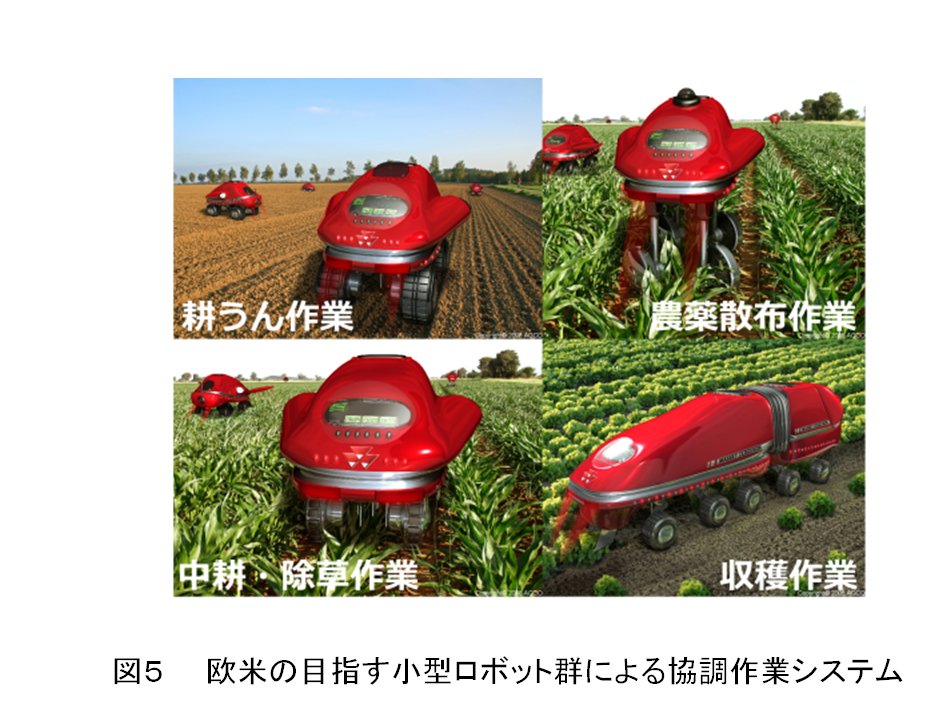
これら諸問題の解決には図5のような小さなロボットが群で協調しながら精密・高効率に作業を行うシステムが有効で欧米ではその研究開発が最近始まりました。実はこれは我々がSIP農業で進めているマルチロボットシステムと同じ発想です。世界の農業技術も目指すところは実は同じなのです。すなわち未来の農業技術は営農規模に応じた適正な機械のサイズという概念がなくなります。
次回は「ロボットのいる営農生活」の3回目(最終回)としてハウスで使われる収穫ロボットやアシストスーツのような車両系以外のロボット技術を紹介したいと思います。
当該コンテンツは、担当コンサルタントの分析・調査に基づき作成されております
公開日
