私はGPSに代表される衛星測位技術を活用した農業のロボット技術・情報化技術の研究をしています。最近ではロボット農業、ICT農業のことを「スマート農業」と総称しています。私がこのような研究を始めたのは25年前です。そのときGPSはとても新しい技術でしたので高価でした。
その一方、GPS測位の精度・安定性・信頼性ともに低いものでした。当時のGPSの主用途は軍事でしたので、GPSという言葉もあまり知られていませんでした。いまではGPSは携帯電話やカーナビなど私たちの身の回りで広く使われていますので小学生でも知っています。大きな変化です。
これから数回にわたり私が行っている農業のロボット技術、情報技術の最前線を解説したいと思います。
まず、なぜいま農業にロボットが必要なのでしょうか? それは日本農業における労働力不足がとても深刻だからです。農家戸数の減少と就業者の高齢化が急速に進んでいます。基幹的農業従事者(仕事として自営農業に主として従事した者)は2014年には168万人、5年間で23万人減りました。過去20年間で半減です。
また農家の平均年齢は66.5歳です。新規就農者も減少の一途で2013年約5万人、5年間で新規就農者は1万人減っています。このような労働力不足が原因で耕作放棄地も40万haに達しています。この面積は滋賀県の面積と同じです。
このような理由からロボット化を含めた超省力技術が、日本農業を持続的に発展させる上で不可欠といえます。ただ、私自身はロボット技術を農業の人手不足解消だけにとどまらず、地域活性化につながる技術にすることが重要と思っています。ロボットによる農業が地域に関連産業を生み住民が増え、町に活気が蘇るという意味です。このあたりの話も次回以降に触れたいと思います。
ただ、この日本農業が抱えている労働力不足は、わが国固有の問題ではありません。日本ほど深刻ではありませんが、先進諸国・新興国でも同様な事情です。各国、農業従事者の減少が進み、特に技術を有した人材の不足が社会問題になっており、国際的に農業機械の無人化は高いニーズがあります。現在ロボットトラクタは米国、欧州、中国、韓国、ブラジルなどにおいて開発中で、この種の研究開発は近年国際的にも大変盛んです。
私の所属している北海道大学ビークルロボティクス研究室は食料生産に関わる諸問題を、ビークル(Vehicle)を基盤技術として解決を図っています。図1はわたしの研究室メンバーとビークルたちです。ビークルには地上を移動する車両(Ground Vehicle)、空中を移動する飛行体(Aerial Vehicle)、水上を移動するボート(Surface Vehicle)、そして宇宙を移動する人工衛星(Satellite Vehicle)がありますが、そのビークルをロボット化する研究が私たちのメインテーマの一つです。
ビークルロボットの対象はトラクタ、コンバイン、田植機、ボートなどですが、私の研究室にはロボット化された農機がトラクタを中心に現在15台あり、世界で最も先進・充実した研究施設と思います。
私個人は23年前に農林水産省所管でさいたま市にある生物系特定産業技術研究支援センターにおいて交流研究員として耕うんロボット開発に携わり、20年前に米国イリノイ大学に留学しました。ここでGPSを使った自動化・情報化研究をイリノイ大学の同僚ととともに始めました。そのあとCASE社(現CNH社)(1996-1998)、John Deere社(2000-2003)など米国の農機メーカーと共同研究を行いました。
研究室の主要な成果はGPSを利用して耕うん、播種、中耕、防除、そして収穫までの全ての農作業を無人化できるロボットシステムを開発したことです。図2はそのロボットシステムの概略です。
我々が開発したロボットトラクタは全ての農作業を無人で行うことができます。作業計画は地理情報システム(GIS)を利用して立てます。作業計画には経路情報のほかに作業機の操作など作業内容も含みます。ロボットはこの作業計画に基づいて自律的に農作業を行うことができます。さらに、ロボットトラクタ自身が格納庫から農道を通って作業すべき圃場に移動して作業を行ない、作業終了後に自ら格納庫に戻るといった完全な無人作業もできます。
ただ、現実には我が国の道路交通法のもとでは無人機は公道を走行できませんので、農道まで無人で移動させることは許されません。ロボット使用者がロボットトラクタを圃場まで運ぶことになります。
ロボットトラクタの位置認識には誤差2〜3cmのRTK-GPS(Real-Time Kinematic GPS)を、また慣性航法装置(Inertial Measurement Unit: IMU)とよばれる姿勢角センサを使用しています。IMUから出力される姿勢角はロボットトラクタの方位認識と傾斜補正に利用しています。このロボットトラクタの作業時の走行誤差は5cm以内で、人の運転能力を超える作業精度を有しています。
図3は代かき作業と夜間耕うん作業について20年以上の営農経験をもつプロ農家と作業の精度を比較した結果です。特に代かき作業は湛水状態のため作業跡が判然としないので圃場全面を均一に高い精度で作業することが難しい作業です。
また夜間作業も周辺が見えづらいので人間にとって疲れやすい作業です。精度を比較した結果は代かき作業の精度はプロ農家が目標経路に対して15.4cmの誤差に対して,ロボットトラクタの誤差は3.5cmにすぎません。
一方、夜間耕うん作業はプロ農家が目標経路に対して11.5cmの誤差に対して,ロボットトラクタは2.9cmの誤差でした。これはロボットトラクタが自身の位置をGPSによって正確に知ることができたからです。農作業は天候に左右されますので、次の日が雨の予報の時は夜を徹して作業することもあります。
この夜間作業は機械周辺が見えづらいので疲れますし、時には睡魔も襲ってくることもあるでしょう。危なく大変な作業と思います。一方、ロボットトラクタは文句も言わずに安全に作業してくれます。このメリットは農作業事故を防ぐうえでも大きな効果です。
このようにメリットが多いロボットトラクタは世界的にみてもいまだ実用化していません。その理由はロボットの安全性確保にあります。多分読者のみなさんは価格(コスト)を気にされていると思いますが、価格はそんなに大きな問題でありません。このあたりについては次回にでも説明したいと思いますが、実用化の障害はまず安全性です。
誰でもロボット農機に近づける圃場というオープンスペースで安全に作業を遂行させるためには、技術開発(ハード)とともに制度(ソフト)の整備が不可欠です。現在、2018年までのロボットトラクタ商品化にむけて農機メーカーが開発を進めているのは安全対策として信頼性の高いヒト検出センサです。農業の現場ではロボットから障害物となるヒトが全身認識できる場合もありますが、イネ、麦など作物の立毛状態でヒトが作物に隠れる場合もあります。
特に図4のように子供です。作業の安全性を確保するためには、どのような作業環境でもヒトを確実に検出できる技術が必要なわけでメーカーは研究開発を進めています。しかし、この課題は現在の科学技術では解決困難で、技術だけで100%の安全性確保は難しいと言わざるを得ません。すなわち、技術だけではロボット農機の事故のゼロリスクは達成できず、リスクの残差を解消するためには制度の整備が不可欠となります。
農林水産省は作業者が目視でロボットを監視するロボット使用を対象にした「ロボット農機の安全性確保ガイドライン」を作成中で、いま最終案が公開されており年度内に策定する予定です。このガイドラインが整備されると保険会社もロボット農機の保険メニューをつくることができ、製造者・使用者ともに安心してロボット農機を販売、使用できるようになります。
現在「ロボット農機の安全性確保ガイドライン」に不具合や不備がないか農水省は安全性確保検討委員会を設置して検証作業を進めています。すなわち、「ロボット農機の安全性確保ガイドライン」が策定された後にロボット農機の社会実装が始まります。その時期は2018年ころということになります。
いままで世の中にない新技術を社会に実装する、いわばイノベーションを起こすには一朝一夕にいかず時間がかかります。ロボット農機の社会実装も社会に混乱が起きないよう一歩ずつ着実に進めていく必要があります。これは技術のほかに社会システムの変化も要求されるからです。しかしロボット農機はまず2年以内にロボットトラクタとして世の中にでます。もうすぐです。次回はこの近未来の農業で使用されるロボット農機についてもう少し詳しく紹介したいと思います。

図1 北海道大学ビークルロボティクス研究室のヒトとロボットたち
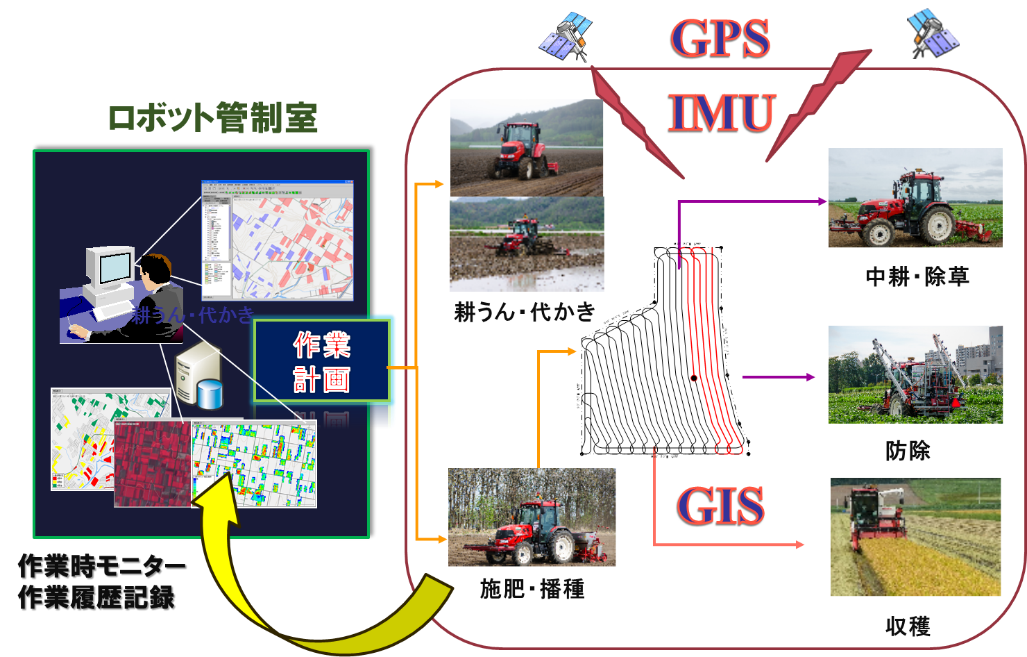
図2 GPSを用いたロボット農業のイメージ
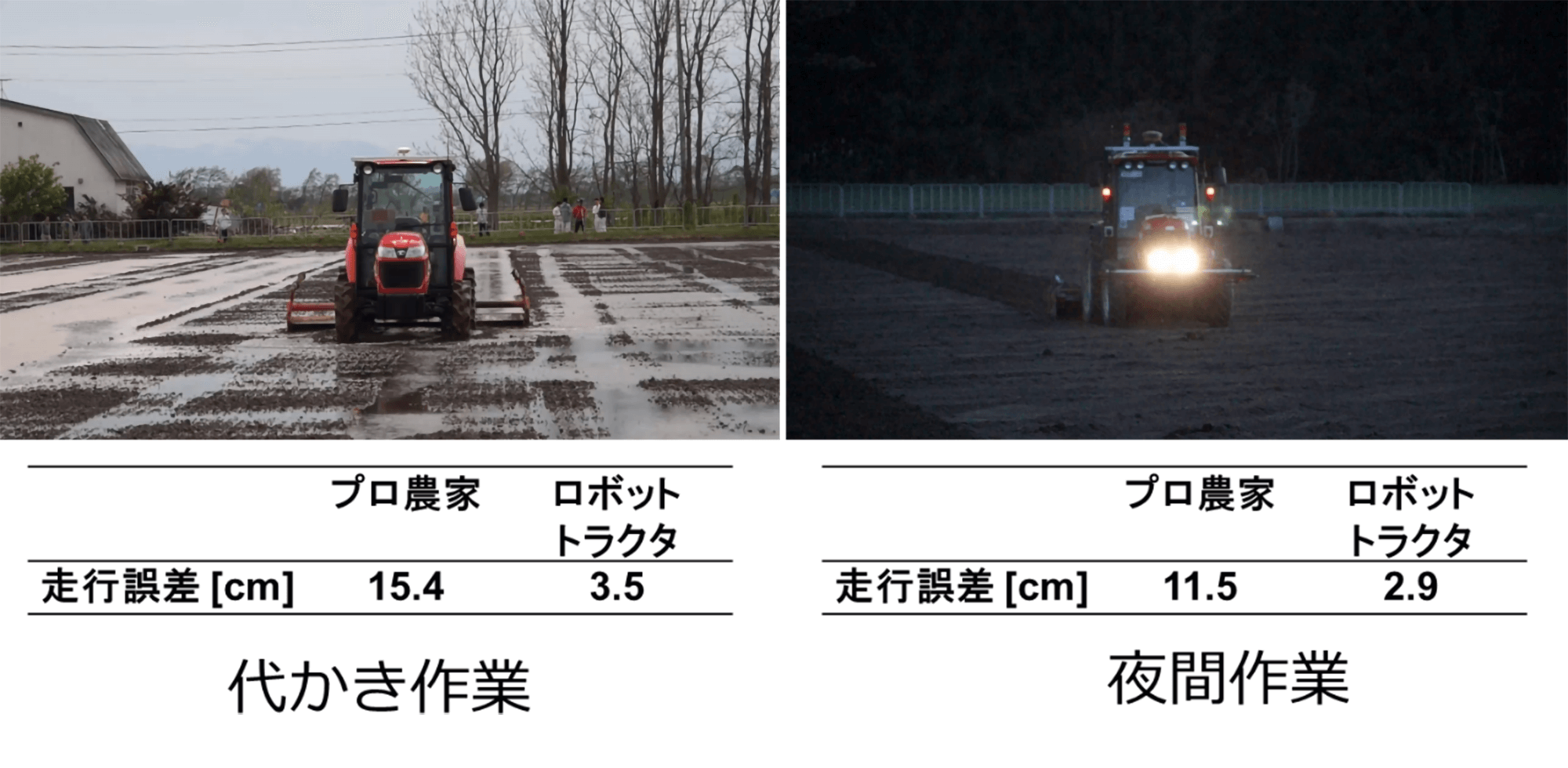
図3 ロボットトラクタとプロ農家の作業精度の比較
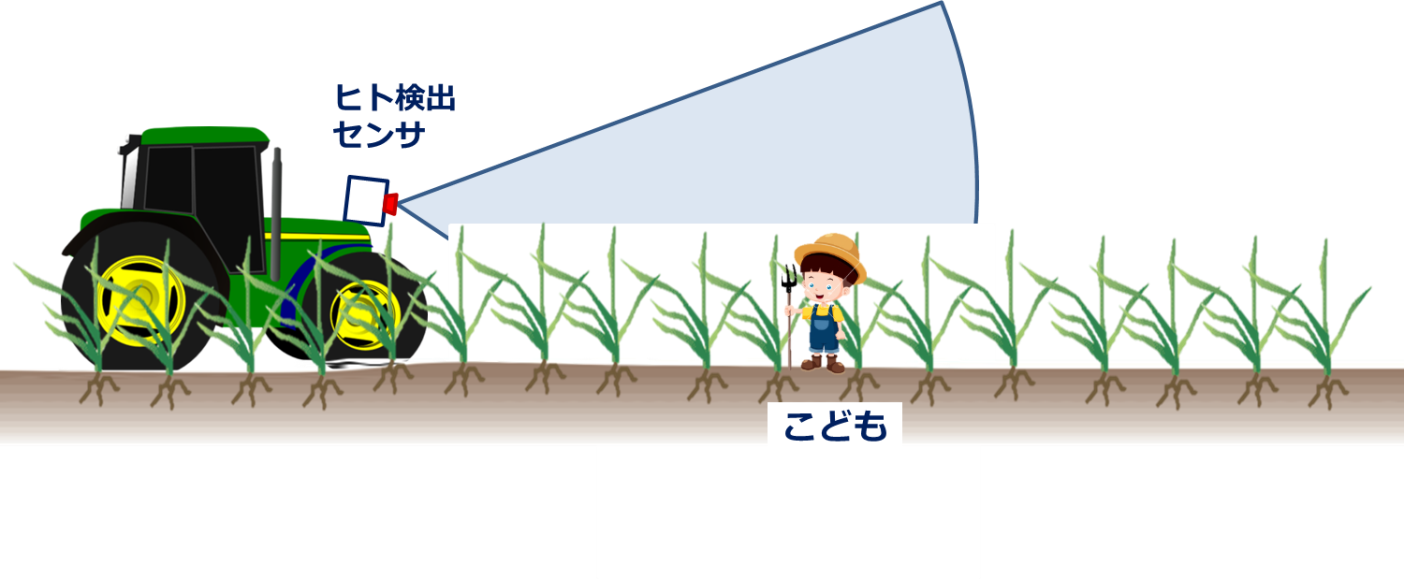
図4 ロボット農機の安全性確保の難しさ
スマート農業の実現に向けた研究会にも参画されている北海道大学 野口教授によるロボットと農業に関するコラムがはじまります。
当該コンテンツは、担当コンサルタントの分析・調査に基づき作成されております。
公開日
