農林水産省は農林水産業・食品産業分野のロボット導入について、今後重点的に取り組むべき分野として以下の3技術を挙げています。
- GPS自動走行システム等を活用した作業の自動化
- 人手に頼っている重労働の機械化・自動化
- ロボットと高度なセンシング技術の連動による省力・高品質生産
「① GPS自動走行システム等を活用した作業の自動化」については、実用化を目前に控え、いままで2回に分けて論じてきました。最終回の今回は「② 人手に頼っている重労働の機械化・自動化」と「③ロボットと高度なセンシング技術の連動による省力・高品質生産」を取り上げたいと思います。②と③の技術は実はまだ実用化されているもの自体多くありませんが、ここでは広く普及が期待されている技術を解説します。
畦畔除草ロボット
「人手に頼っている重労働の機械化・自動化」の要望には、たとえば畦畔除草や中山間地域の棚田法面のような傾斜地における除草作業があります。除草のロボット化は農家ニーズがとても高いです。もしかすると農家が一番求めているロボットかもしれません。お掃除ロボットのような小型ロボットが水田の畦畔除草をすれば農家は本当に楽になることでしょう。実際に中山間地で農業就労者がリタイヤする大きな要因に傾斜地の畦畔管理ができなくなるからと言われています。特に高齢者にとって除草作業は厳しい作業で、耕作放棄地発生の一因になっています。転倒・転落など作業中の事故も多く、農作業事故の20%を占めます。このような背景から中山間地にある急傾斜地まで作業できる除草ロボットが産学の共同研究で開発中です(図1)。このロボットは走行系と刈刃の姿勢制御は電動モータ、草刈部はエンジンで駆動され、全ての動きはリモコンで操作できます。完全自動でありませんが、刈払い機よりもずっと楽で安全です。ロボットの大きさは前後1.7m、幅1m、高さ57cm、重量140kgで、軽四輪トラックの荷台に載せられる大きさです。また最大速度は秒速40cm、作業可能な最大傾斜角度は40度、瞬時ならば45度まで対応できます(図2)。ただこの除草ロボットは、刈り払い機よりかなり高価なので、普及段階では共同利用になるのでしょうが、その利用法の確立が必要です。また、作業能率が人間の2倍程度なので能率向上も課題といえます。
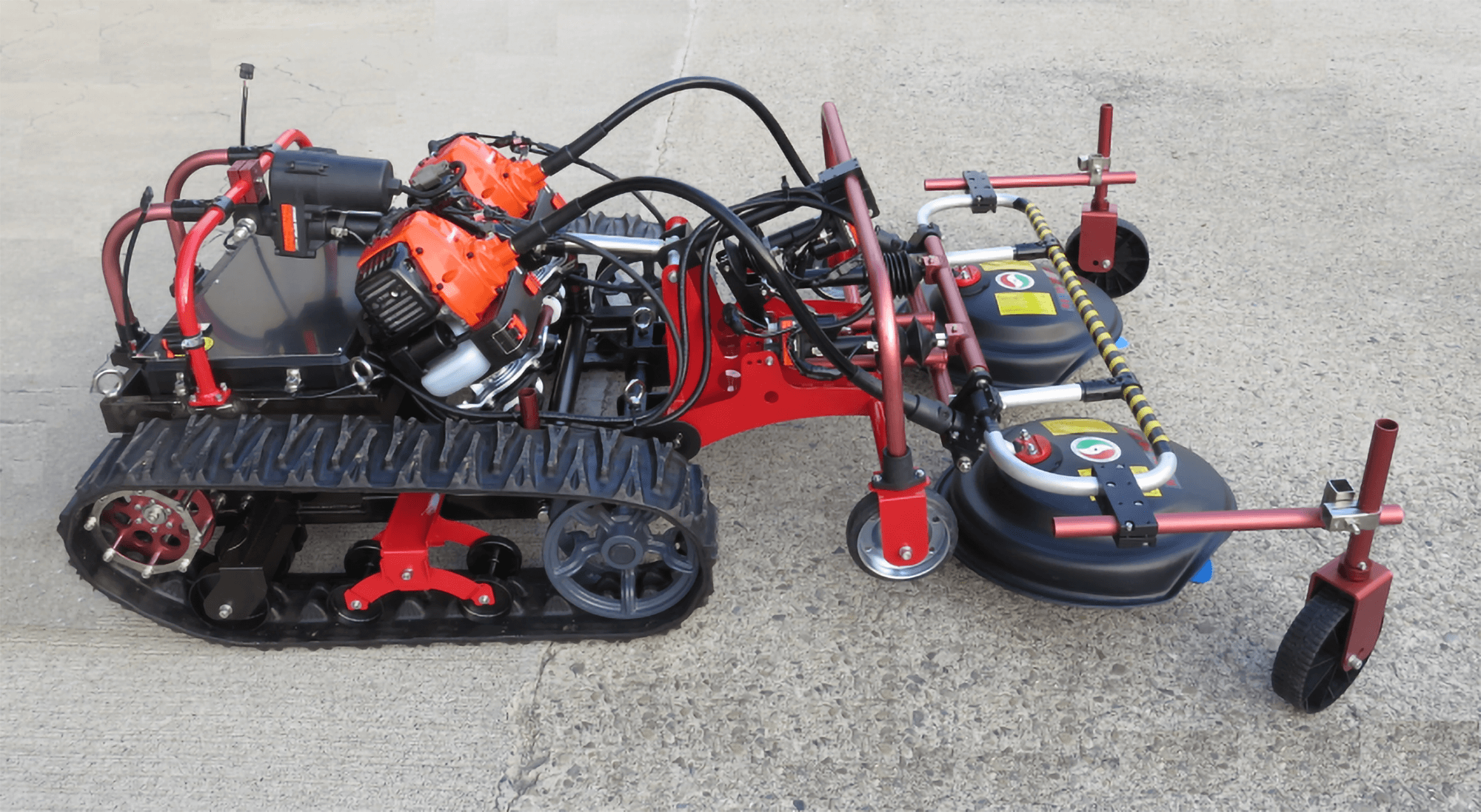
図1 畦畔除草ロボット
提供:中土宜明(新産業創造研究機構 研究開発コーディネーター)

図2 40度の斜面で作業する除草ロボット
提供:中土宜明(新産業創造研究機構 研究開発コーディネーター)
アシストスーツ
重労働から解放してくれるロボット技術には重量野菜の収穫やコンテナ運搬など足腰に負担の大きい作業を楽にするアシストスーツも有望です(図3)。すでに国内外で商品化されたものもありますが普及はこれからです。ここでは農業用を念頭に置いて開発を進め、近いうちに商品化が予定されている和歌山大学の八木栄一名誉教授が開発中のアシストスーツを紹介したいと思います。図4は八木先生が開発した重量物の持ち上げ作業や中腰作業や歩行や運搬作業をアシストするアシストスーツです。上体アシストアーム、下体アシストアーム、歩行アシスト用靴、持ち上げアシスト用手袋、電動モータなどから構成されています。アシストスーツの総質量は7kgで、1回の電池充電で約2時間使用することができます。腰や股関節の角度や手袋、靴底のオン/オフ信号を、無線装置を介してマイコンに送信し、動作意図を推定して作業者のアシストに必要なトルクを算出して電動モータがアシスト力を出力する仕組みです。たとえば、歩行のアシストは歩行アシスト用靴の靴底の力の変化から動作意図を推定して電動モータで歩行をアシストします。たとえば上り坂ではアシストしますが、降るときには自動的にアシストが切れるよう工夫されています。また、持ち上げ作業のアシストは持ち上げアシスト用手袋内のスイッチを握り込むとアシストしてくれる仕組みです。スイッチを任意のタイミングで押すことでアシストを受けることができます。

図3 アシストスーツを装着した作業風景
提供:八木栄一(和歌山大学名誉教授)

図4 アシストスーツ本体(緑色のところに電動モータが格納)
提供:八木栄一(和歌山大学名誉教授)
植物生育診断ロボット
次に「③ロボットと高度なセンシング技術の連動による省力・高品質生産」の一例を説明します。このような高度な技術は温度、炭酸ガス濃度、溶液濃度など生産環境を制御できる太陽光植物工場にまず導入されます。ロボットとセンシング技術の連動という技術は、まさに知能化されたロボットです。栽培ノウハウの可視化とデータ化は太陽光植物工場において重要な課題といえます。また、太陽光植物工場は自然エネルギーや水資源を効率的に利用できる生産システムに展開できることも特徴の一つです。太陽光植物工場では地域固有の気象資源を有効に活用して最適な環境制御を行わなければ植物の生産性を向上させることは難しいです。その理由から地域の自然環境を把握したうえで植物工場内環境を制御することが要求される太陽光植物工場は、いまだ高い技術を有した人のオペレーションが必要で、工業化・産業化に発展させるうえで大きな障害となっています。すなわち、太陽光植物工場による食料生産を工業化・産業化するためには非接触なセンシング技術によって植物生体の状態を検出して、検出データに基づいて最適な環境状態を探していくことが要求されます。このコンセプトはSpeaking Plant Approach(SPA)として世界的にもよく知られています。センシングデータと栽培プロセスのデータベースから栽培ノウハウを抽出して知識ベースに展開することが、まさに知識の可視化でありインテリジェント制御に直結します。特に植物の生育センサが重要です。ここでは、その生育をセンシングするロボットの例として愛媛大学植物工場研究センターと井関農機の共同研究によって生まれた実装型クロロフィル蛍光画像計測ロボットを紹介しましょう(図5)。植物の生育状態のわずかな変化を把握できる画像計測装置を愛媛大学農学部の高山弘太郎准教授が開発しました。クロロフィル蛍光という量を画像で計測するのですが、このクロロフィル蛍光から植物の光合成機能を知ることができます。この画像計測を植物工場全面にわたり行えば、植物の光合成機能を空間分布として知ることができ、この分布は生育の空間変動でもあるわけです(図6)。診断装置は自動走行機能を装備しているので生育診断ロボットといえます。この診断結果に基づいて植物工場内の環境を適切に制御してトマト糖度のような品質向上に役立てることができるのです。
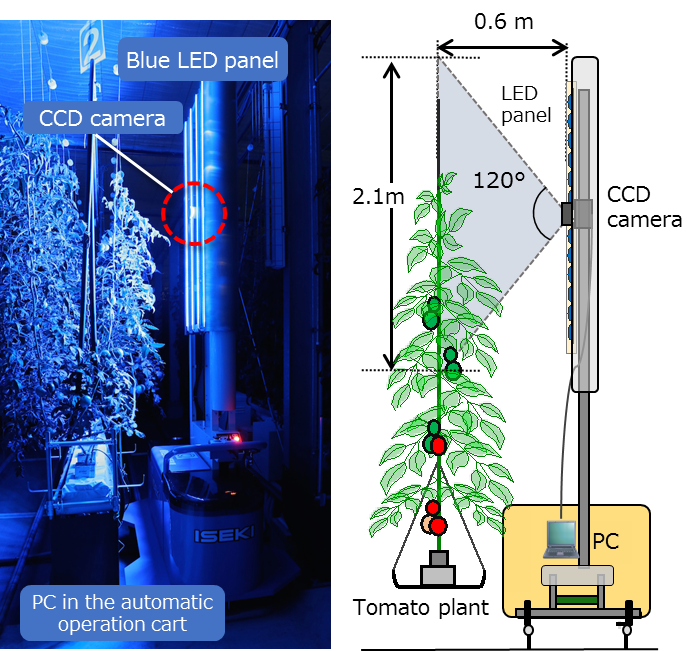
図5 実装型クロロフィル蛍光画像計測ロボット
提供:高山弘太郎(愛媛大学農学部准教授)
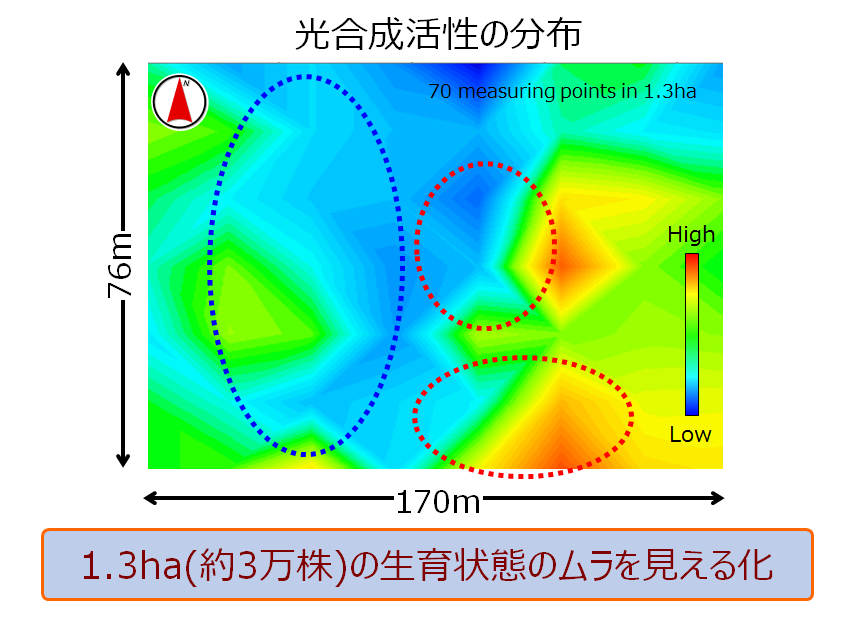
図6 大規模太陽光植物工場における光合成機能の分布
提供:高山弘太郎(愛媛大学農学部准教授)
イチゴ収穫ロボット
また当然、施設内で作業を行うロボットの導入も期待されています。施設園芸では育苗-管理-収穫-調製-出荷などほとんどの作業がいまだ手作業であり、施設園芸における労働力不足は深刻です。たとえばイチゴの生産における育苗-定植-管理-収穫-調製-出荷などの合計労働時間は全国平均で10a当たり2,100時間にもなるといったデータがあります。このような事情から実際にイチゴ収穫ロボットも農研機構農業技術革新工学研究センターが中心になり開発しています(図7)。図8のシステムによってLEDと単眼カメラでイチゴの着色度合いを判定し、果実位置をステレオカメラで計測して、採果ハンドが果実を傷まないようにハンドリングし摘み取りができる極めて高い技術です。ただし、収穫は適期果実のうち60〜70%に留まります。すなわち、残りは人が収穫しなければなりません。他の研究組織ですが、最近話題のAI(人工知能)を画像認識に利用することで果実認識能力の向上を目指した研究も行われています。他方、付加価値の高い果物、野菜、花卉等の高価格な農産物を法人組織で大規模に生産することで、ロボット導入の効果を最大化できることも魅力です。次世代施設園芸は消費者が求めるオーダーメイドな食料生産を可能にし、農産物の生産から消費までのフードチェーン全体を対象にした自動化が進んだ生産システムになることが予想されます。
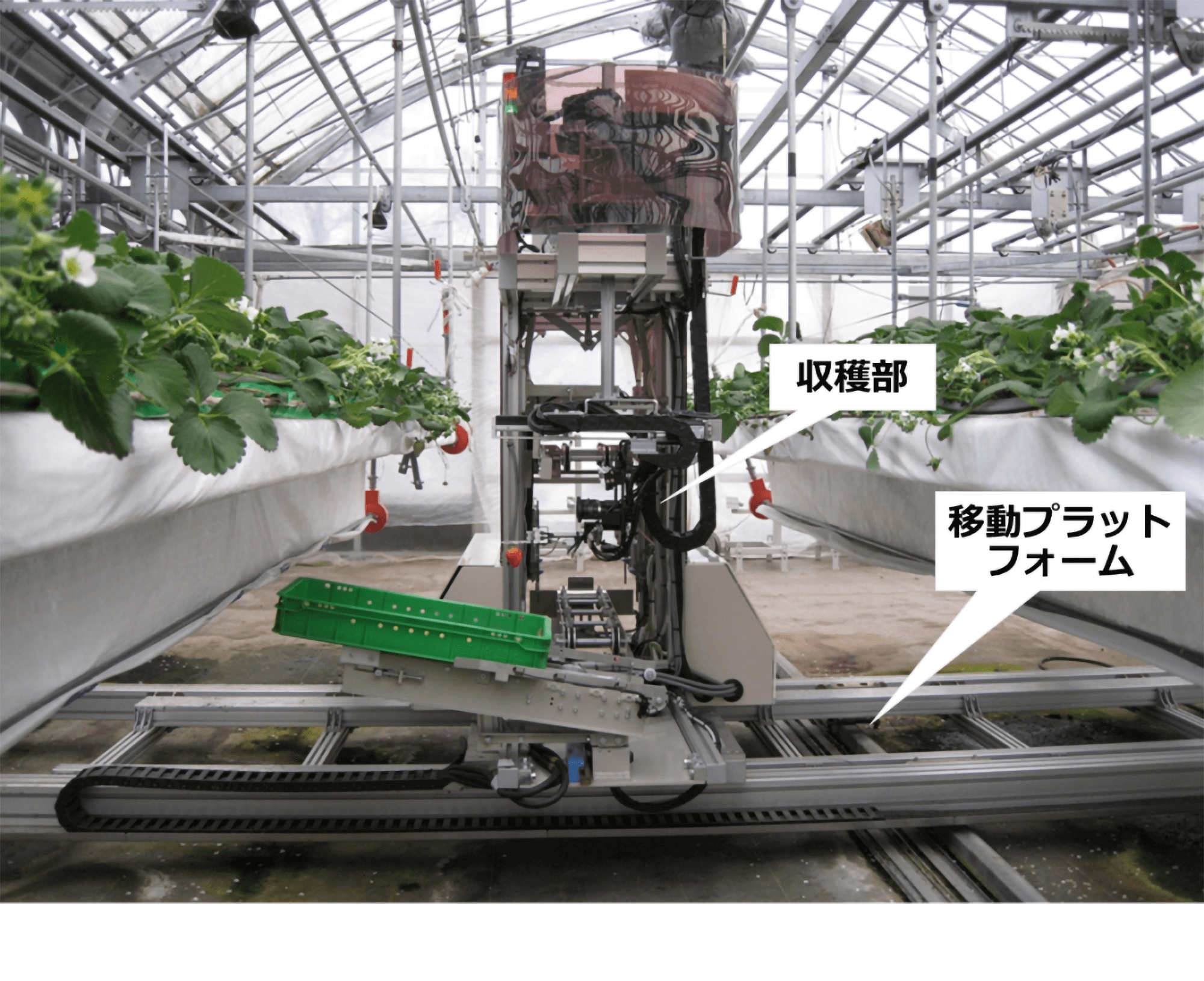
図7 移動型収穫ロボットの全体図
提供:内藤裕貴(農研機構・農業技術革新
工学研究センター研究員)
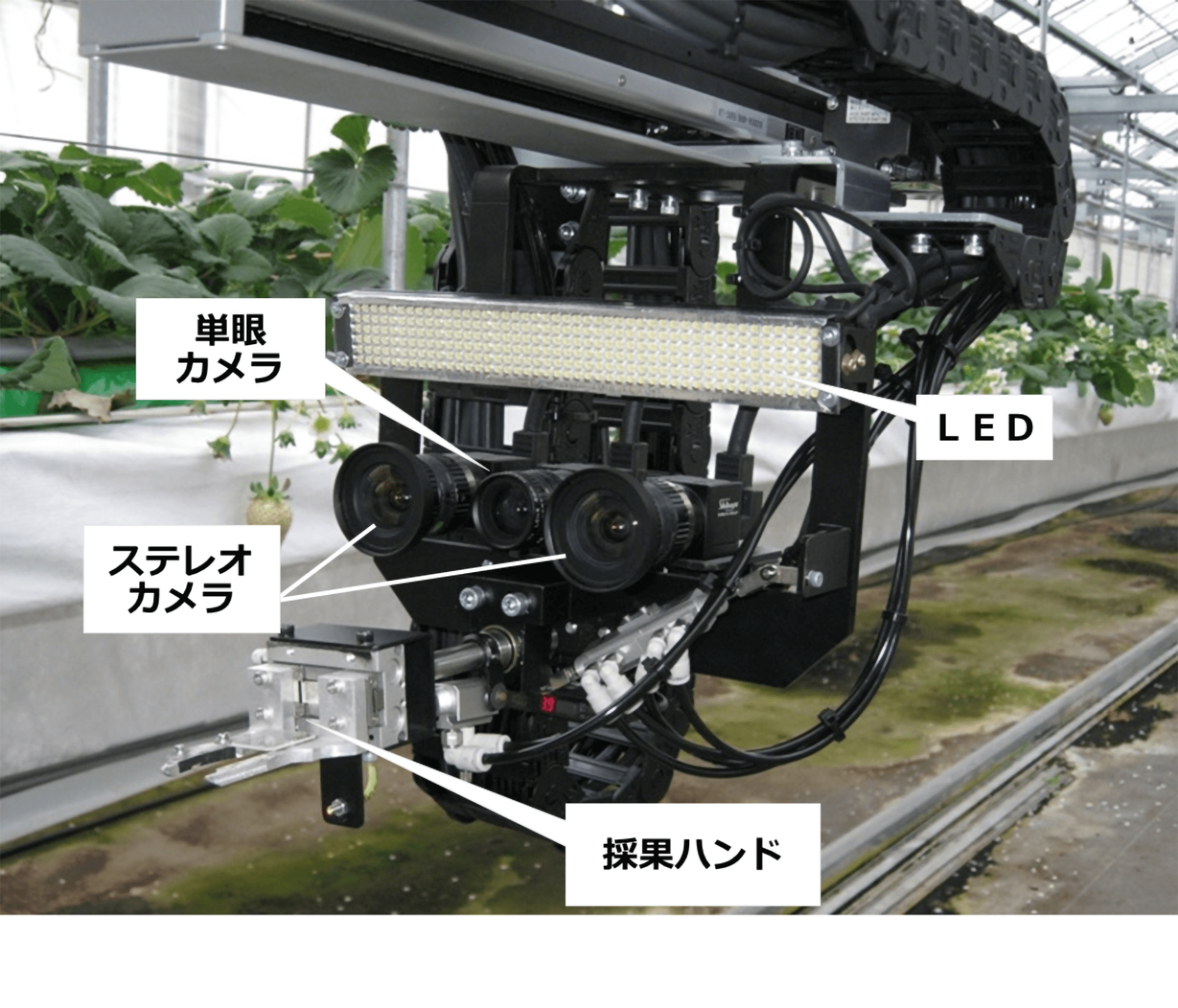
図8 画像認識部と採果ハンド
提供:内藤裕貴(農研機構・農業技術革新工学研究センター研究員)
当該コンテンツは、担当コンサルタントの分析・調査に基づき作成されております。
公開日
